map底层原理和注意事项
map是Go语言提供的一种抽象数据类型,它表示一组无序的键值对(key-value)
# 声明
关键字定义:map
零值:nil
var m map[string]int
map对于value的类型没有限制,但是对key的类型有严格的要求:key的类型必须支持"=="和"!="两个操作符的数据类型,因此:函数、map、切片不能作为key类型。
向nil(未初始化)的map类型里添加数据会导致panic注意
# 初始化
字面量初始化
m:=map[string]int{"apple":2,"banana":3}1内置函数make()初始化
m:=make(map[string]int,10)1
# 操作
package main
import "fmt"
func main() {
m := make(map[string]int, 10)
m["apple"] = 1 //新增
m["apple"] = 2 //修改
delete(m, "apple") //删除
v, ok := m["banana"] //comma ok 查询
if ok {
fmt.Println(v)
}
fmt.Println(len(m)) //获取key的个数
for k, v := range m { //遍历m
fmt.Println(k, v)
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
👀
- 删除不存在的key不会导致panic;
- 查询不存在的key,如果未使用comma ok语法,则会返回value类型对应的零值
# 底层原理
参见$GOROOT/src/runtime/map.go
# map的数据结构
type hmap struct {
count int //当前保存的元素个数
flags uint8 //当前map所处的状态标志
B uint8 //bucket数组的大小的对数:2^B=bucket数量
noverflow uint16 //overflow buckets的大约数量
hash0 uint32 //hash函数的种子值
buckets unsafe.Pointer //指向bucket数组的指针
oldbuckets unsafe.Pointer //在map扩容阶段指向前一个bucket数组的指针
nevacuate uintptr //map扩容阶段充当扩容进度计数器,小于此bucket都已完成了数据排空和迁移操作
extra *mapextra //可选字段,与gc相关
}
2
3
4
5
6
7
8
9
10
11
# bucket的数据结构
// a bucket for a Go map
type bmap struct {
tophash [bucketCnt]uint8
}
// 实际上编辑期间会动态生产一个新的结构体
type bmap struct {
tophash [8]uint8
keys [8]keytype
values [8]valuetype
overflow uintptr
}
2
3
4
5
6
7
8
9
10
11
12
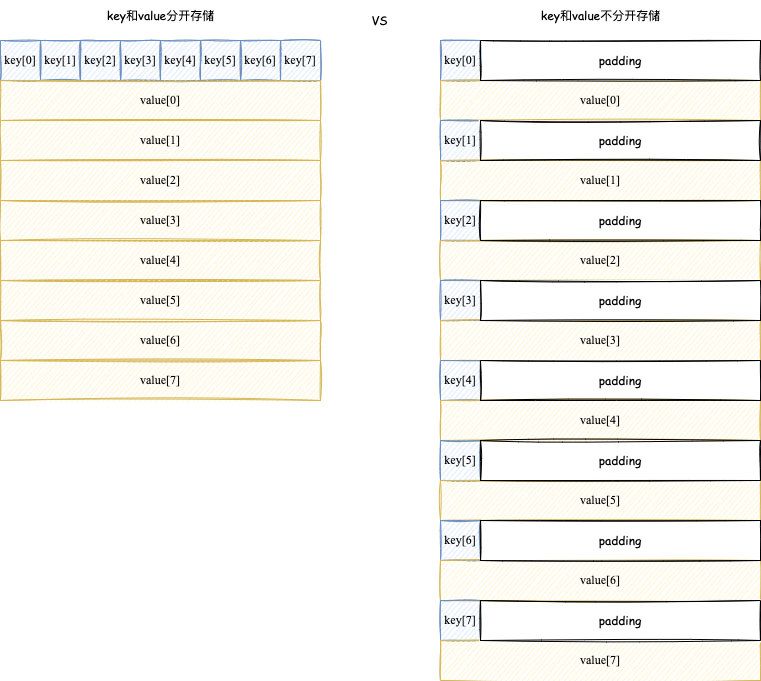
key和value分开存储,目的是为了减少内存对齐带来的内存浪费,以map[int8]int64为例:
每个bucket可以存储8个键值对,超过就会创建一个新的bucket,通过overflow链接
当有两个或以上数量的键被Hash到了同一个bucket时,我们称这些键发生了冲突,Go语言使用链表解决键冲突。
hash冲突并不是好事情,它降低了存取效率,好的Hash算法可以保证Hash值得随机性,但无论使用哪种Hash算法,冲突终究不可避免,当冲突较多的时候就需要采取一些措施来减少冲突。
# 负载因子LoadFactor
负载因子用于衡量一个Hash表的冲突情况,计算公式如下:
负载因子 = 键数量 / bucket数量
- 负载因子过小,空间利用率低;
- 负载因子过大,说明冲突严重,存取效率低;
当Hash表的负载因子过大时需要rehash,即申请更多的bucket,并对所有的键值对重新组织,使其均匀的分布在这些bucket中。
- redis的负载因子大于1时就会触发rehash,因为redis的每个bucket只能存1个键值对;
- go的负载因子大于6.5时才会触发rehash,因为go的每个bucket可以存8个键值对;
# 扩容
条件:
- 负载因子大于6.5时
- overflow的数量大于2^15=32768
map的扩缩容的主要区别在于hmap.B的容量大小改变,而缩容由于hmap.B压根不变,内存占用依然存在。这就导致在删除元素时,并不会释放内存,使得分配的总内存不断增加,如果不注意,内存就很容易爆了。注意 Go map 如何缩容? (opens new window)
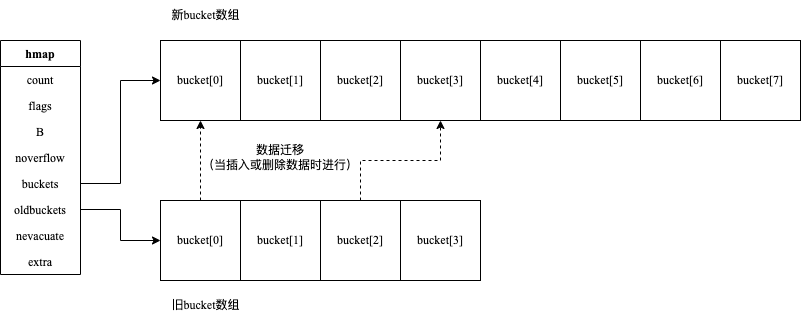
# 增量扩容
通过将bucket数组扩大一倍实现,并搬迁键值对
- oldbuckets指向现有bucket数组;
- 创建一个两倍现有规模的bucket数组;
- buckets指向新的bucket数组;
- 将oldbuckets的键值对搬迁到新的bucket数组;
- 释放oldbuckets;
# 等量扩容
用于解决一个bucket链接很多bucket,overflow数量过高
bucket数组大小不变,重新排列键值对,分散到不同的bucket数组中
这样就提高了访问效率
# 增删改查
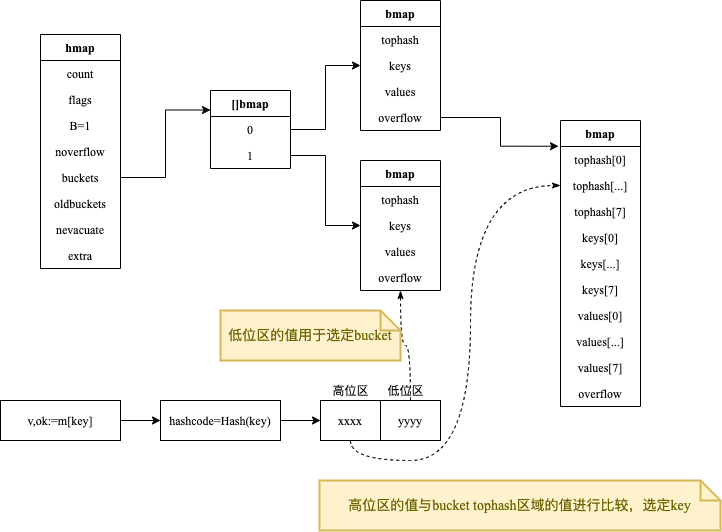
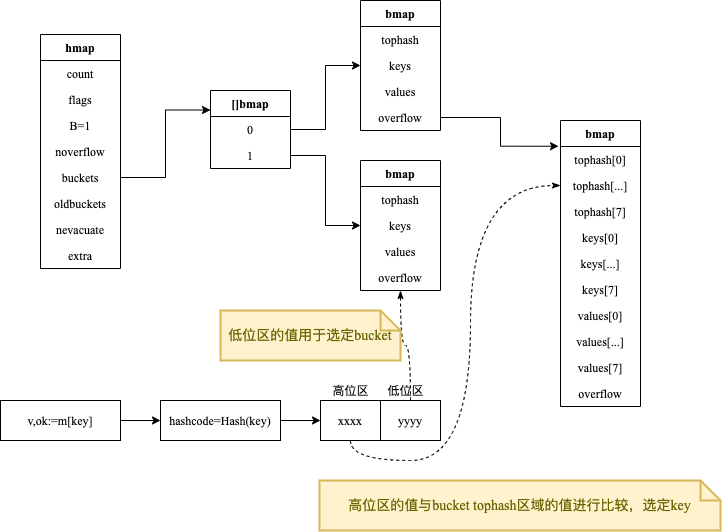
# 查找过程
- 根据key计算hash值;
- 取hash值低位与hmap.B取模来确定bucket的位置;
- 取hash值高位,在tophash数组中查询;
- 如果tophash[i]中存储的hash值与当前key的hash值相等,则获取tophash[i]的key值进行比较;
- 当前bucket没有找到,则依次从溢出的bucket中查找;
如果当前map处于搬迁过程中,那么查找时从oldbuckets数组中查找,不再从新的buckets数组中查找
# 添加过程
- 根据key计算hash值;
- 取hash值低位与hmap.B取模来确定bucket的位置;
- 查找该key是否存在
- 如果存在,则直接更新;
- 如果不存在,则从该bucket中寻找空余位置并插入;
如果当前map处于搬迁过程中,那么直接添加到新的buckets数组中
# 删除过程
- 查找key是否存在
- 存在,则删除;
- 不存在,则什么也不做;
# map注意事项
# 非并发读写安全的
package main
import (
"fmt"
"time"
)
func doIteration(m map[int]int) {
for k, v := range m {
_ = fmt.Sprintf("[%d, %d] ", k, v)
}
}
func doWrite(m map[int]int) {
for k, v := range m {
m[k] = v + 1
}
}
func main() {
m := map[int]int{
1: 11,
2: 12,
3: 13,
}
go func() {
for i := 0; i < 1000; i++ {
doIteration(m)
}
}()
go func() {
for i := 0; i < 1000; i++ {
doWrite(m)
}
}()
time.Sleep(5 * time.Second)
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
运行报错:fatal error: concurrent map iteration and map write
Go 在 map 的实现中增加了读写检查机制,一旦发现读写冲突立即触发 panic
如果想使用并发的map:
- 可以使用Go 1.9版本中引入支持并发写安全的
sync.Map类型; - 可以使用map时增加锁;
# 无法通过索引直接获取value的地址
package main
import "fmt"
type Num struct {
id int
}
func main() {
m := make(map[int]Num)
m[0] = Num{0}
value := m[0]
fmt.Println(value)
fmt.Println(&value)
fmt.Println(&m[0]) //invalid operation: cannot take address of m[0] (map index expression of type Num)
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
这是由于map会扩容,map中的数据元素的value地址可能在扩容过程中发生变化,因此获取这个地址没有意义,Go语言为了防止出现该问题,在编译期间就检测是否有获取地址行为,避免出现问题。
# 尽量使用cap参数初始化map
package main
import "testing"
const size = 10000
func BenchmarkMapInitWithoutCap(b *testing.B) {
for n := 0; n < b.N; n++ {
m := make(map[int]int)
for i := 0; i < size; i++ {
m[i] = i
}
}
}
func BenchmarkMapInitWithCap(b *testing.B) {
for n := 0; n < b.N; n++ {
m := make(map[int]int, size)
for i := 0; i < size; i++ {
m[i] = i
}
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
性能基准测试结果如下:
go test -benchmem -bench=. cap_benchmark_test.go
goos: darwin
goarch: amd64
cpu: Intel(R) Core(TM) i5-8259U CPU @ 2.30GHz
BenchmarkMapInitWithoutCap-8 1226 1338887 ns/op 687175 B/op 276 allocs/op
BenchmarkMapInitWithCap-8 2534 425859 ns/op 322225 B/op 11 allocs/op
PASS
ok command-line-arguments 5.939s
2
3
4
5
6
7
8
